|
|
Workbench Documentation Preface and Getting Started Product Synthesis Human Builder |

Human Builder базируется на лучшей в своём классе системе моделирования человеческого тела, которая много лет разрешала детальное исследования в связанных с человеком проблемах проектирования в контексте рабочего места, прежде чем это осуществлялось физически. Human Builder обеспечивает очень точное моделирование людей и их взаимодействий с продуктами, чтобы гарантировать что они будут работать естественно на рабочем месте, приспособленном к их задачам. Продукт Human Builder особо фокусируется на создании и управлении цифровыми людьми для начального анализа взаимодействия человечек-продукт.
Human Builder состоит из множества передовых инструментальных средств для создания, манипулирования и анализа как манекены могут взаимодействовать с продуктом. Манекены могут использоваться для оценки соответствия формы продукта, пригодности и функциональности. Манекены могут быть созданы интуитивно и управляться совместно с цифровым макетом, чтобы проверить характеристики, типа области действия и видимости. Простой в использовании интерфейс гарантирует, что первичные исследования человеческих факторов могут быть предприняты неспециалистами в области человеческих факторов.
Инструментальные средства продукта Human Builder включают генерацию манекена, технические спецификации рода, спецификации процентиля, прямую кинематику и методы обработки обратной кинематики, генерацию анимации, монокулярное, бинокулярное и амбикулярное моделирования зрения, а также конусы сектора обзора.
Начало работы
Эта обучающая программа позволит Вам получить представление о возможностях Human Builder. Просто следуйте предложенным ниже пошаговым инструкциям.
Создание стандартного манекена
|
|
В этом примере будет продемонстрировано как создать стандартный манекен. После создания манекен появится в дерева спецификации под выбранным отцовским продуктом. Манекен будет компонентом выбранного продукта. |
|
|
|
1. |
На панели меню выберите Start.
|
|
|
2. |
Потом выберите Ergonomics Design & Analysis -> Human Builder.
|
|
|
3. |
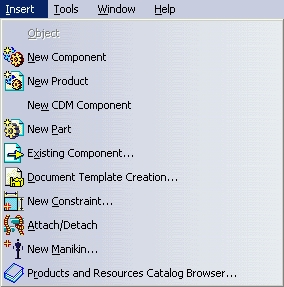
Из меню Insert выберите New Manikin.
или
Нажмите иконку Manikin Creation
|
|
4. |
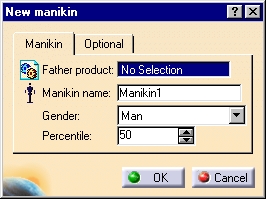
Открывается диалоговое окно New manikin с двумя закладками: Manikin и Optional. |
|
|
|
Закладка Manikin |
|
|
|
Father product: Поскольку манекены создаются в документах CATProduct, Вы должны выбрать родительский продукт в дереве спецификации. Имя родительского документа автоматически будет помещено в поле, доступное только для чтения.
|
|
|
|
Родительский продукт - это продукт, к которому будет приложен манекен в дереве спецификации. Это может быть как корневой продукт, так и любой другой продукт в дереве.
|
|
|
|
|
Следует учитывать, что родительским продуктом не может быть другой манекен.
Manikin name: В этом поле Вы можете определить название манекена как, например, Driver, Passenger, Machine X Operator и т.п. Это название будет использоваться для идентификации манекена в документе. несколько манекенов могут иметь одинаковое название. По умолчанию манекену присваивается название Manikin1 (2, 3 и т.д.) и манекен будет сохранён в файле Manikin1.CATProduct.
Gender: В этом поле Вы можете определить, будет это мужской или женский манекен. Percentile: Вы можете выбрать процентиль (между 0.01 и 99.9).
|
|
|
Процентиль приложен к росту, а также к весу нового манекена. Это определяет группу, к которой манекен будет принадлежать, в пределах заказанного статистического населения. Другими словами, рост и вес нового манекена будет установлены в выбранном процентиле. Все другие антропометрические переменные будут оценены системой, основываясь на антропометрической базе данных по умолчанию.
|
|
|
|
|
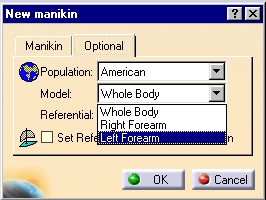
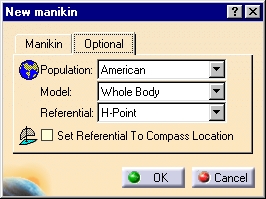
Закладка Optional
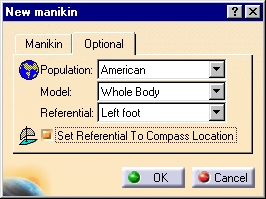
Population: В этом поле выберите национальность манекена из встроенного набора населения: American, Canadian, French, Japanese или Korean. Model: В этой поле выберите желаемый тип модели: Whole Body (целое тело), Right Forearm (правое предплечье) или Left Forearm (левое предплечье). Referential: В этой области выберите начальную ссылочную точку нового манекена. Возможные варианты выбора: Eye point, H-Point (выбирается по умолчанию), Left foot, Right foot, Lowest foot и Crotch. Set Referential to Compass Location: Если этот параметр активизирован, Вы будете иметь возможность назначить начальную позицию манекена с помощью компаса. Если этот параметр не активизирован, манекен будет отображен в позиции по умолчанию (центр системы координат). |
|
5. |
Нажмите кнопку OK. Новый манекен появляется. Возможно придётся
нажать на иконку Fit All In
|
|
Пример |
||
|
|
1. |
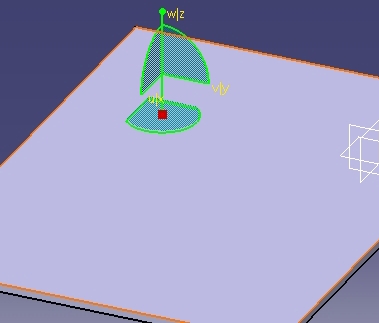
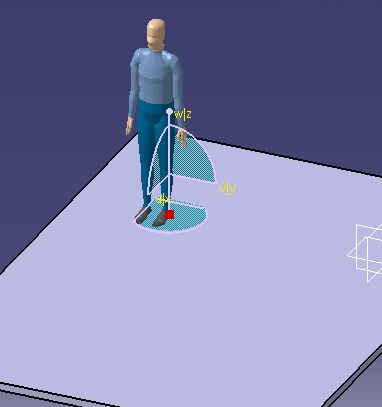
Откройте файл Floor.CATProduct. Закрепите компас в желаемой позиции на полу.
|
|
|
2. |
Нажмите иконку Manikin Creation
Манекен создан с определённой ссылкой (left foot) к расположению компаса.
|
Создание Forearm/Hand модели
|
|
Этот пример описывает как создать модель предплечья с шарнирной рукой. |
|
|
|
1. |
Из меню Insert выберите New Manikin.
или
Нажмите иконку Manikin Creation
|
|
|
2. |
Открывается диалоговое окно New manikin.
|
|
|
3. |
Выберите Father product и Manikin name. Одобрите установки по умолчанию в полях Gender, Population и Percentile. Для Model выберите Right Forearm или Left Forearm.
Нажмите кнопку OK. Полученный результат продемонстрирован на приведённом ниже рисунке.
|
|
|
После создания модели руки разместите её с помощью компаса как Вы уже размещали манекен. Также возможно выполнить следующие действия:
вставить локальные положения из библиотеки. |
|
|
|
|
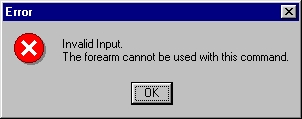
Некоторые функции не могут быть использованы для модели предплечья/руки.
Это: функция Vision
|